The wolverine machine: An Amphibious Robot
For the Mechanical Systems Design (ME112) final project, we were given a mission to create an amphibious robot that could swim in shallow waters for 1m and climb a 20% grade (11.3°) dry incline that was covered with several 2cm high obstacles. Our robot had to be unguided and complete each part of the course within 30 seconds.
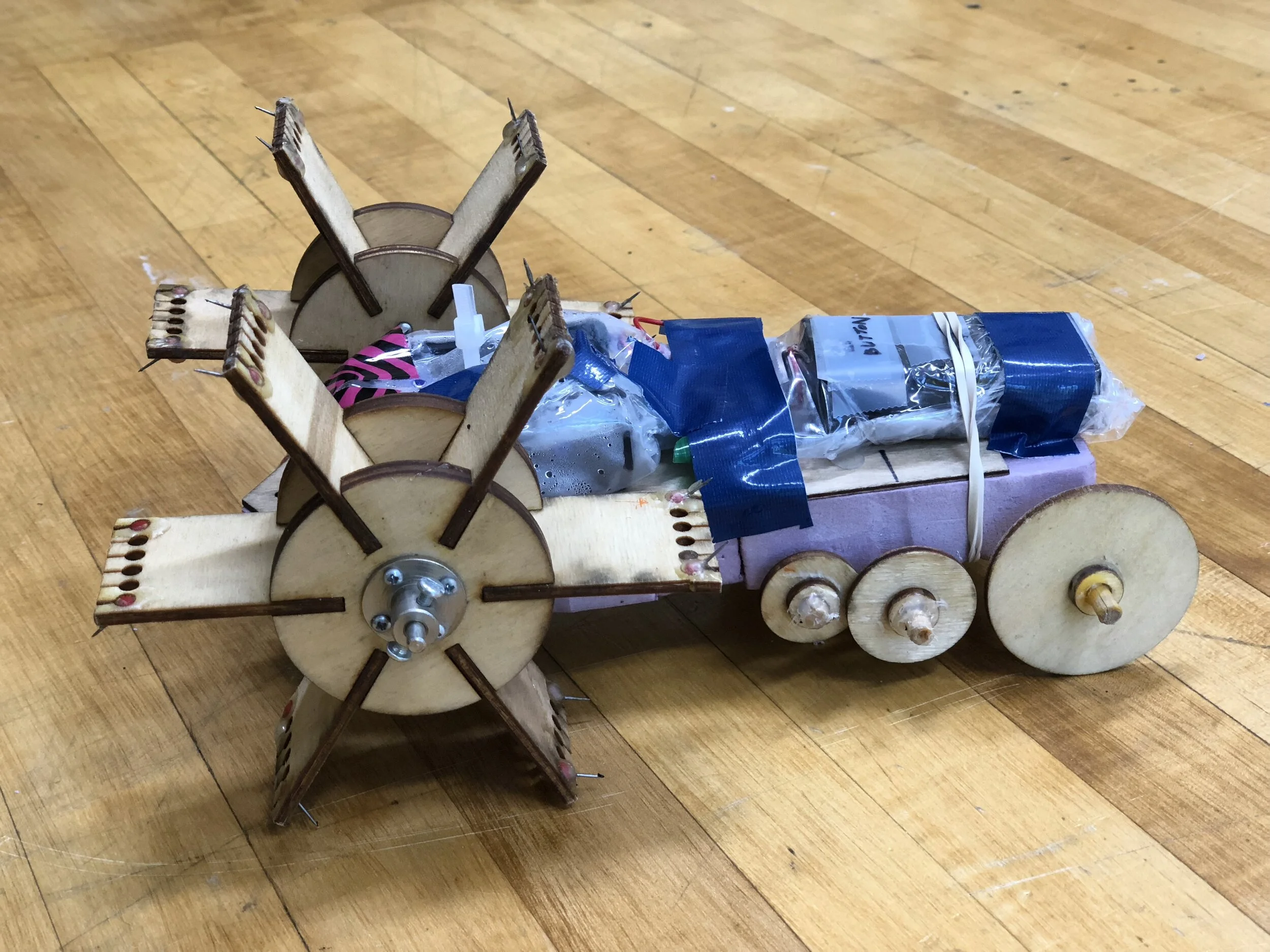
After considering many different designs, we built a robot (see Fig. 1) in the shape of a boat with whegs; we named it Wolverine. Whegs, a locomotion mechanism that is a hybrid of wheels and legs, are versatile because they can propel through water, walk on land, and overcome obstacles. Wolverine’s body was made of pink foam; on top of it, we had a base plate and the gearbox and batteries (both sealed in a plastic bag for waterproofing). Additionally, on the underside of our boat, we attached three dowels, which acted as shafts for six free-moving wheels. Connected to the gearbox were two whegs, with paddles that were studded vertically with pin needles. The pin needles helped with traction between the whegs and the ramp, and reduced slippage when the whegs came in contact with the obstacles on the ramp. The free-moving wheels, which rose to the side of Wolverine’s body, helped reduce friction between the bottom of the boat and the ramp. The chain of wheels enabled Wolverine to move over the obstacles more smoothly. We used a gear ratio of 196.7:1 in our Tamiya 6 speed gearbox. Wolverine’s motor operated with a 47.5% efficiency on 3V, and was powered by two 1.5V AA alkaline batteries.
Our final robot (see Fig. 1) was weighed at 365 g, and was 28.26 cm x 17.78 cm x 12.7 cm. In the water, its velocity was 0.238 m/s (covered 1 meter in 4.2 seconds), and on the ramp its velocity was 0.149 m/s (covered 1 meter in 5.7 seconds). We operated our motor at 3.11V, and it drew 0.55 A of current while on the ramp, 0.87 A on the obstacles, and 0.4 A in the water. On Game Day, the motor efficiency averaged around 42% on the ramp and 33.87% in the water, which matched our previous analysis on maximizing efficiency.
In the future, we would like to improve Wolverine’s durability and directional capabilities. Wolverine veered left while going over obstacles. We want to work on fleshing out more details of its structure and mass so that we can rectify this. Additionally, we would like to work on making more mechanical connections within our system, rather than being reliant on Epoxy and hot glue, so that it can last longer.
-written by Celine Wang, Nicole Aw, Tom Welch, and Melissa Marable (the team that created this robot)